195-NSW-Stud Welding System
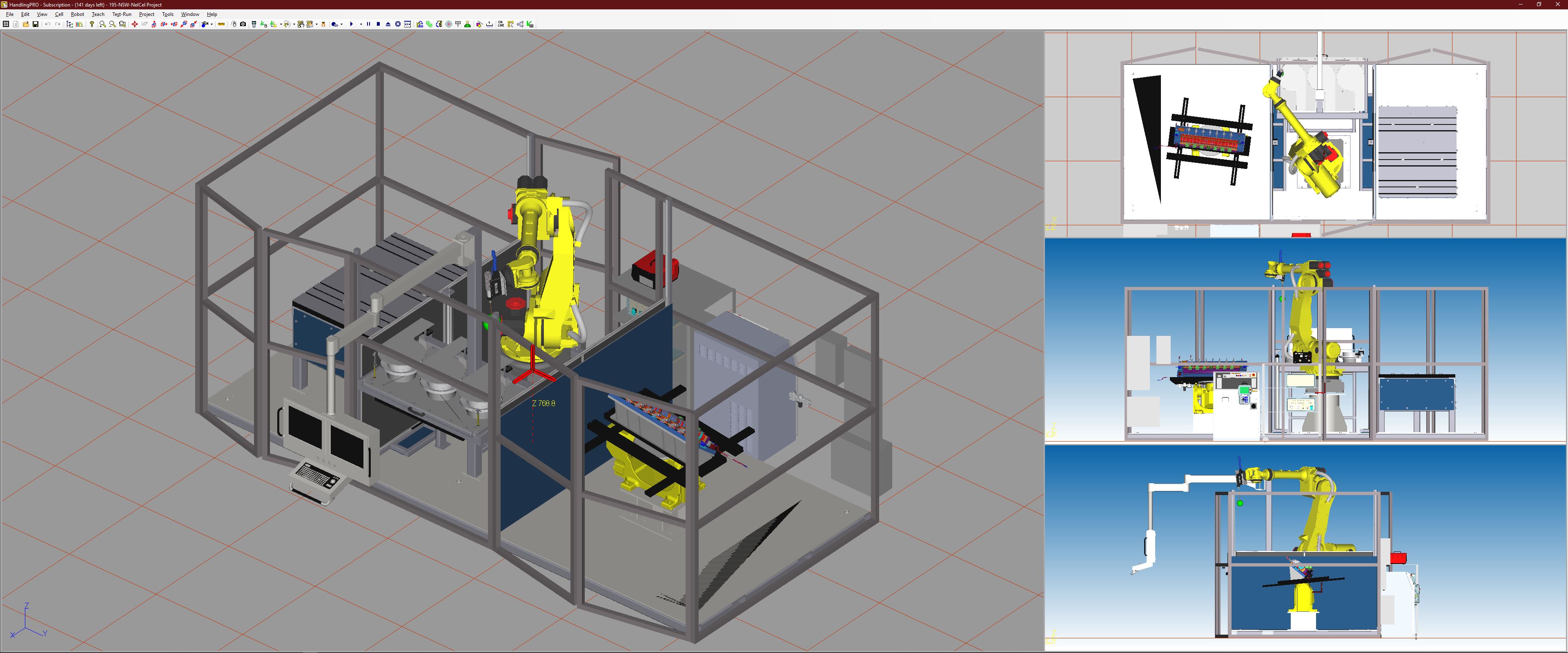
This FANUCR-2000iB/165F V7.70 Robot. Design and develop of the Robotic Stud welding Robotic System including review the project details including Risk assessment, Robot DSC setup, Safety and field I/O. Create a RoboGuide showing cell equipment, safety features, auxiliary tilt turn table, review robot options, help develop communications via EIP and PCDK Includes the kickoff meeting, create I/O listing and generate a device layout. Communications interface to the existing system and robot. Generate RoboGuide Simulation cell layout to perform reach study, time analysis. The cell simulation will be used later for software development Design and develop Handling tool Teach Pendant programs to control all robot motion, and control to peripheral devices. the robot, I/O configuration, DCS configuration, EIP setup & testing, drop in robot programs test the programming interface via PCDK. debugging the electrical mechanical and operator interface of the system. The system will be powered up, I/O testing, manual mode testing, automatic mode and confirm system meets specifications with the customer RAT Onsite installation assistance including System verification, Power up System, I/O verification, Test all safety devices, teach robot positions, manual mode verification, automatic mode verification and system acceptance. Operator and maintenance training will be included. (FEB-2011)
185-ESS Technologies-StarPlex Project

Perform the programming, debugging and installation assistance of a 12 station rotary dial index system to load vials with a predetermined amount of solution, verify its volume and then close the vial with a cap, torqued to a specific tightness. The vials were then unloaded and labeled and verified prior to packaging. The system was controlled with an Allen Bradley PLC, HMI and Serco’s servo drives.
166-PPG Industries, Inc.-Alloy Laser Welding System (ALWS)
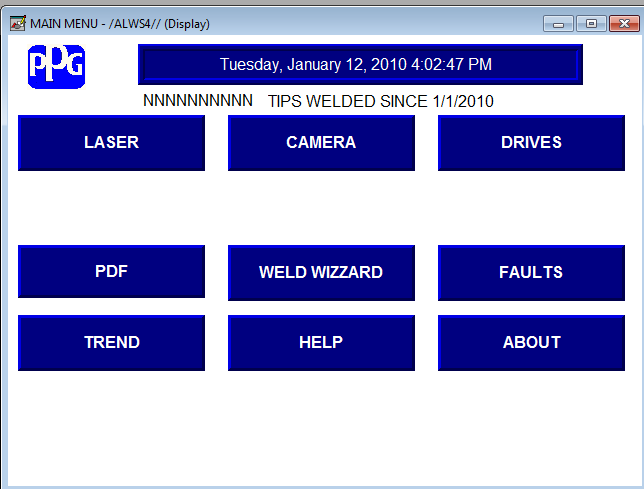
This FANUCS-430iF V5.11 Robot. PPG's existing YAG laser welding system was having maintenance problems and there Unix PC was outdated and unreliable. I was asked to convert their control system, three axis servo table and camera to a new Allen Bradley PLC and HMI, Aerotec servo system and Cognex camera. The system welds small eyelets in different array patterns. The new system networked the PLC, Servo Drives, HMI and Camera on an EIP network. The system created a recipe of parts that would run based on a set of variables. The part would be bolted to the x-y table and its origin defined. The system would move to the next weld, locate its center, weld the eyelet to the plate and then move to the next eyelet. The system would continue until complete. The project consisted of design, develop, debug, install and train the operators and maintenance personnel how to operate and maintain.
158-Shakespeare Composite Structures-Robotic Pole Painting System
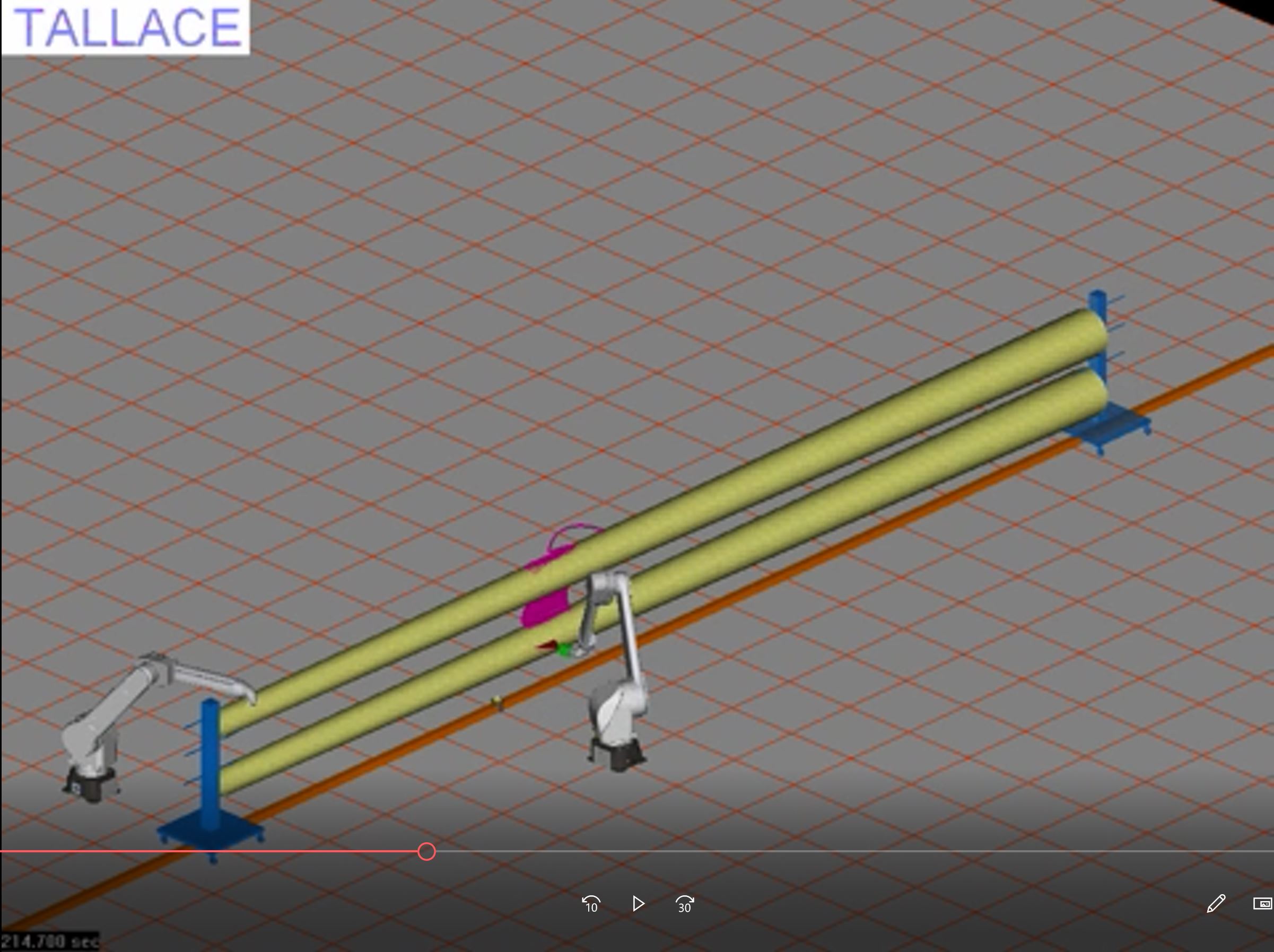
This FANUCS-430iF V5.11 Robot. Shakespeare's existing two FANUC P250 paint robots paints 35' tapered poles three at a time using line tracking. There paint patterns were taught by hand and not very efficient. I created an excel spreadsheet that calculated the positional data based on part variables and then generated the TPP programs and imported into the robot using the ASCII robot option. Now the center of the paint spray pattern is always normal to the part throughout the complete pole pattern. The paint transfer efficiency increase significantly and the paint thickness consistency also improved. The pole lengths also grew to 50' long.
125-SEW-Lapping Automation
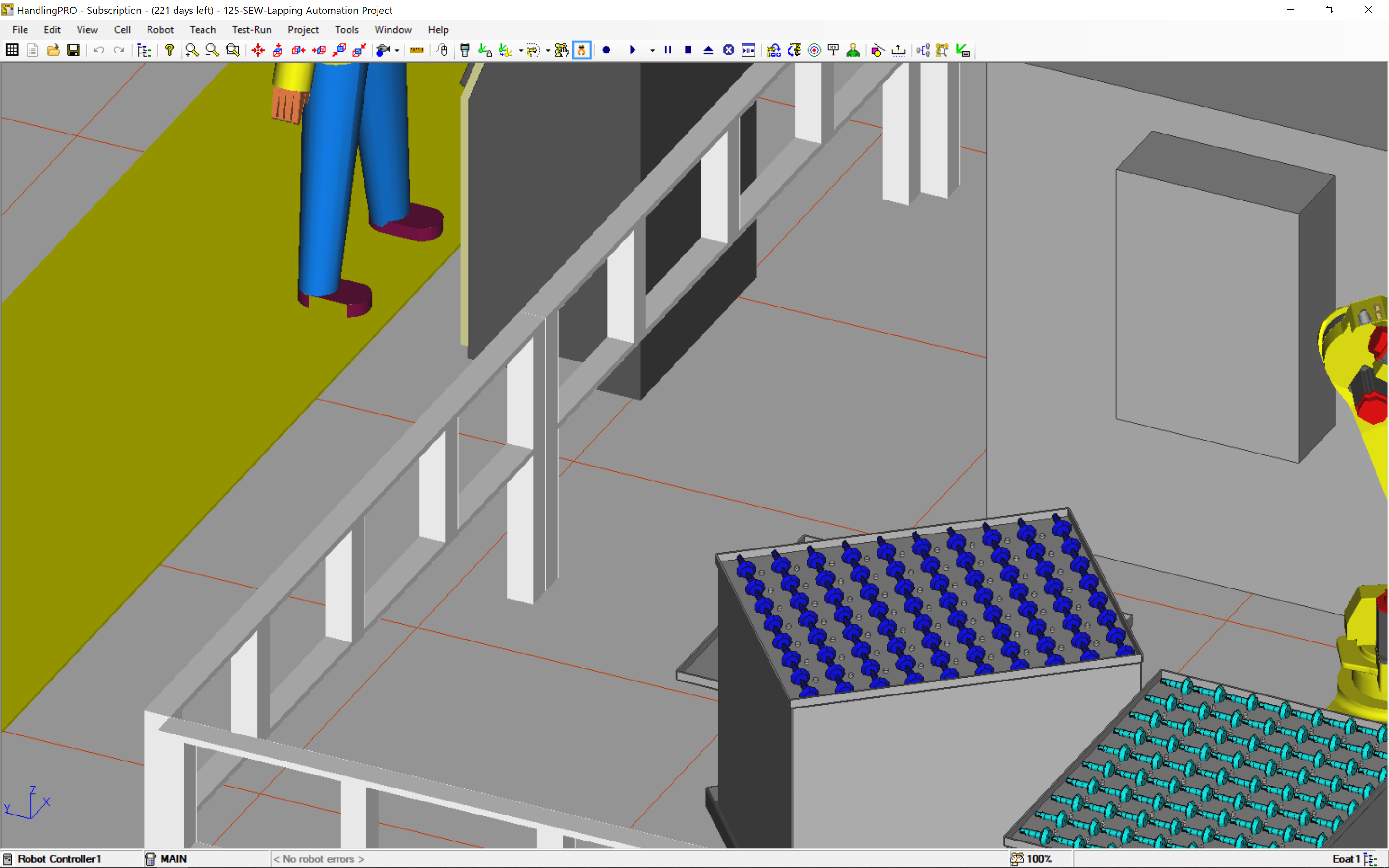
This FANUCM16-L Robot. The M16-L robot will take a picture of the new part in the tray to determine part type, location and orientation. The Robot will then pick up the
next gear and pinion form their associated raw trays, re-orient the parts and perch in front of the Gleason 600HTL (23C, 23D) machines ready
to load. When the machine cycle is complete and the doors open, the robot will remove the finished parts from the fixtures, load the new raw
parts and cycle the machine. The robot will then place the finished parts into respective finished tray location and get the next set of raw parts.
The robot will transfer the trays between layers. Two empty tray stations are needed.
Additional stations are available (cleaning station, quality drawer, reject station, gauging station blow-off station and flip station)
121
This FANUCS-430iF V5.11 Robot. Add additional PINT and QUART palletizing patterns. Karel programming required
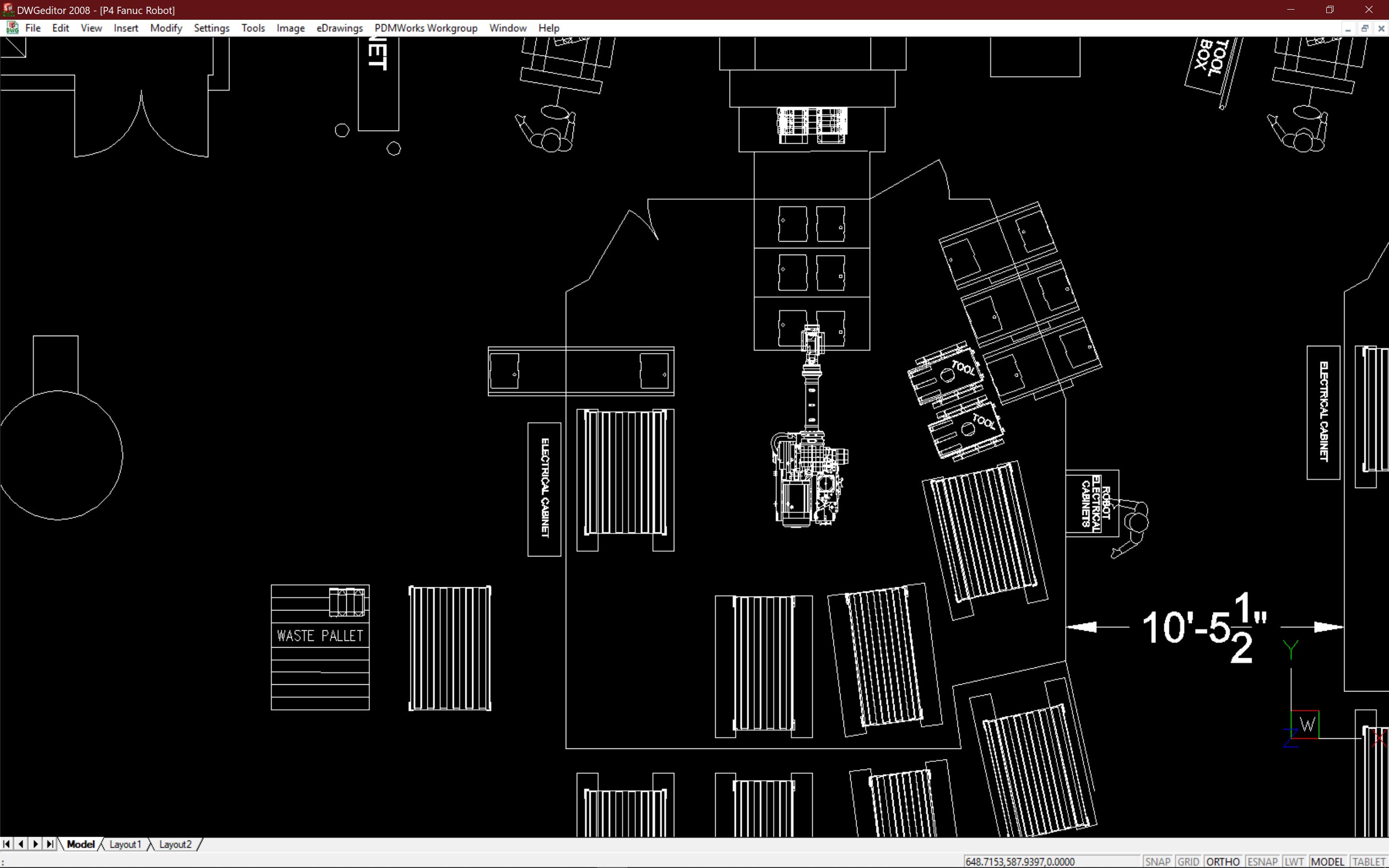
120-SEW Paint Line Automation
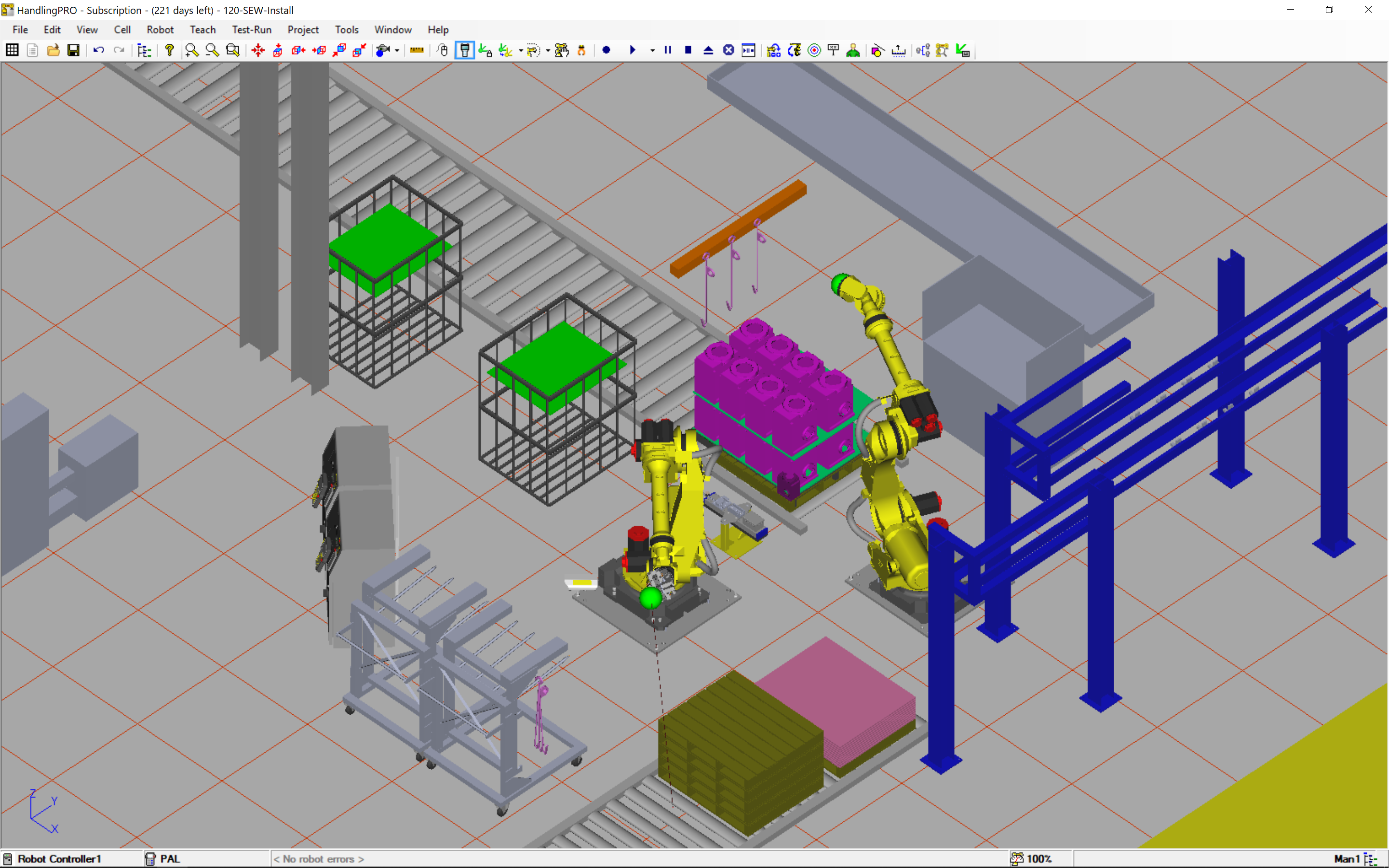
This FANUCR-2000iB V7.20 SEW came to me to see if we could design a system to automate their manual casting loading operation. After careful thought, I believed I could design a solution for this complex task. I ask to prove my concept on a real robot to prove to myself and SEW that the concept is possible. After a successful demonstration, the project began. There are two FANUC R-2000 robots in the system. The first robot would scan a rack of paint hooks to locate, extract and then measure its deviation with an IRVision camera. The hooks are staged for the second robot. Pallets of castings arrive on an infeed conveyor and are presented to the robot. The robot will get the staged hook and then goto the next part on the pallet and with IRVision, locate the casting. The robot would fish the bent hook into the josseled casting. Once the casting is de-palletized the operation was verified with vision and then cleaned and loaded onto the paint line. Between layers are wooden divider and plastic pallets that had to be removed and stacked so the robot would pick up a vacuum tool and then pick and place the dividers and pallets. There are 18 different gearbox castings from small to very large. (OCT 2008)
121-Decostar Industries, Inc.-Robot Tooling Inspection
PPG's existing YAG laser welding system was having maintenance problems and there Unix PC was outdated and unreliable. I was asked to convert their control system, three axis servo table and camera to a new Allen Bradley PLC and HMI, Aerotec servo system and Cognex camera. The system welds small eyelets in different array patterns. The new system networked the PLC, Servo Drives, HMI and Camera on an EIP network. The system created a recipe of parts that would run based on a set of variables. The part would be bolted to the x-y table and its origin defined. The system would move to the next weld, locate its center, weld the eyelet to the plate and then move to the next eyelet. The system would continue until complete. The project consisted of design, develop, debug, install and train the operators and maintenance personnel how to operate and maintain.
121-Decostar Industries, Inc.-Robot Tooling Inspection
This FANUCS-430iF V5.11 Robot. The robot would move around the tool to verify that the tool meets specifications prior to run.
109-ACI-Decostar IMM System
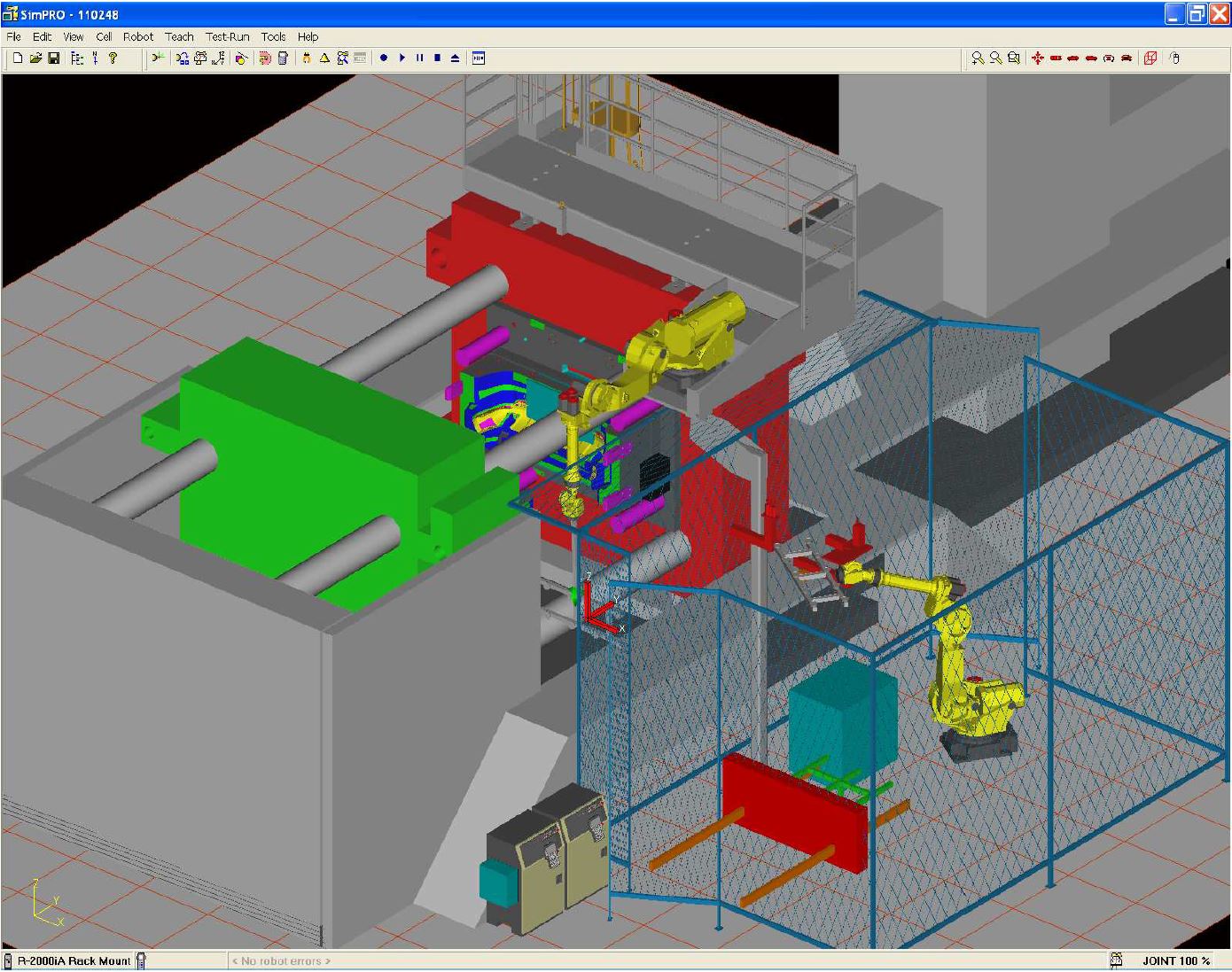
This FANUCR-2000iB V7.20 Robot I was hired for Installation Assistance because I designed and developed the original system several years back. Two FANUC R-2000 Robots, one mounted to a Cincinati Milacron Injection molding machine and one on the floor. The top robot would extract a fascia bumber out of the mold and pass it down to the floor robot. The floor robot would load the part into a punch press to remove the sprues and runners. The part was then unloaded and placed on an outfeed conveyors. The robots had automatic ATI tool changers and used the SPI robot option.
106-SEW-Retrofit paint line
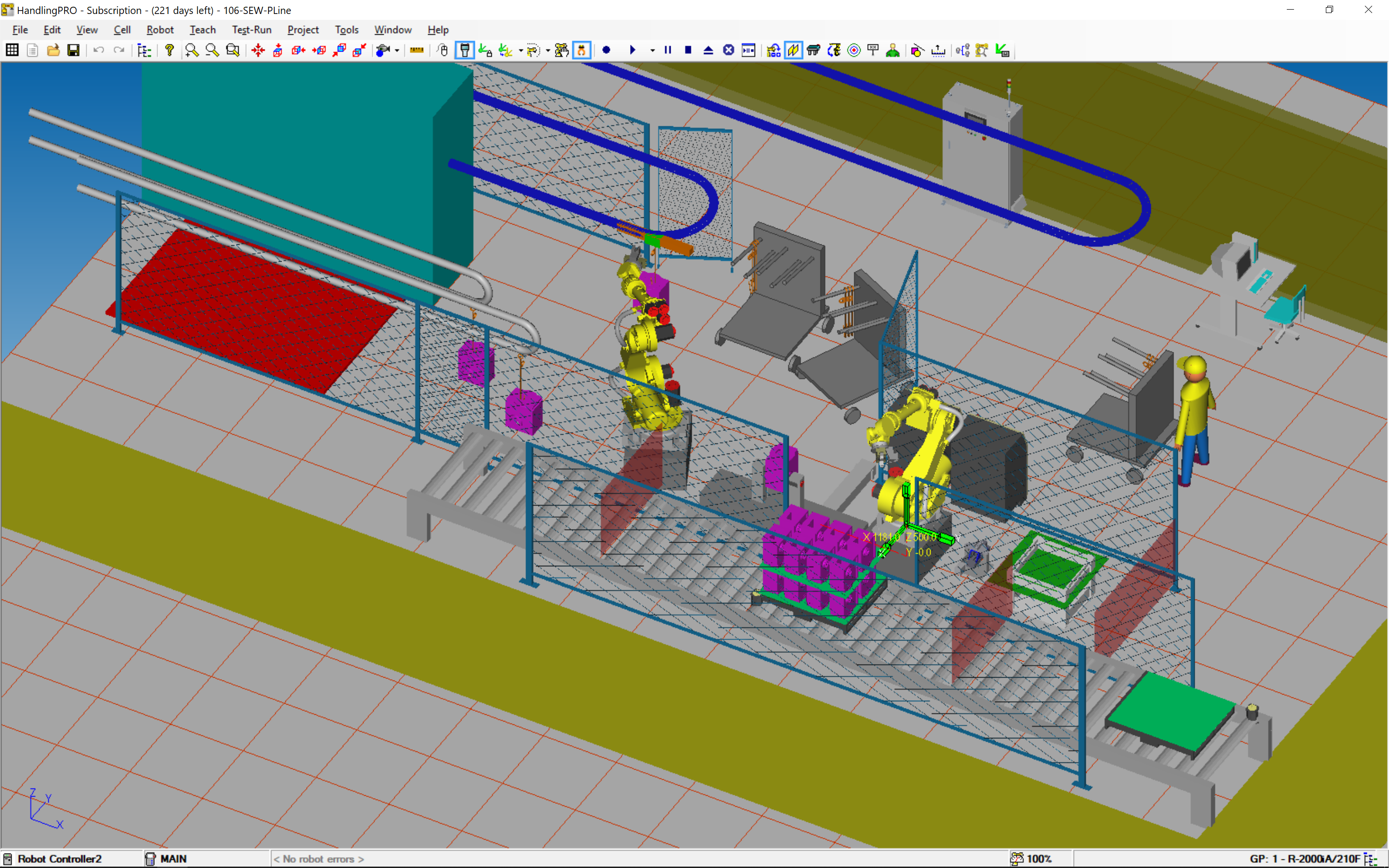
This FANUCR-2000iB V7.20 Robot Added a second robot to an existing paint unload system. The second robot palletized 18 different gearbox castings into a basket with wooden dividers while the existing robot removed the castings hanging on paint hooks and placed it into a holding press. While the part was clamped, the R-2000 robot would fist the hook out of the part and place it into a hook rack. The incoming backed deviation created problems for the palletizing cycle so a laser was used to detect the basket height and offset the pallet patterns. The soft float robot option was used to perform a controlled collision into the basket to handle the parts corectly. The robot would pick up a vacuum gripper to handle the wooden layer dividers.
105-FC-Custom palletizing System
This FANUCM-410iHS V7.20 Robot Create custom robot program for Palletizing 4Lb bundles of sugar into interlocked pallet patterm.
104-BOSCH-Hub & Spindle System
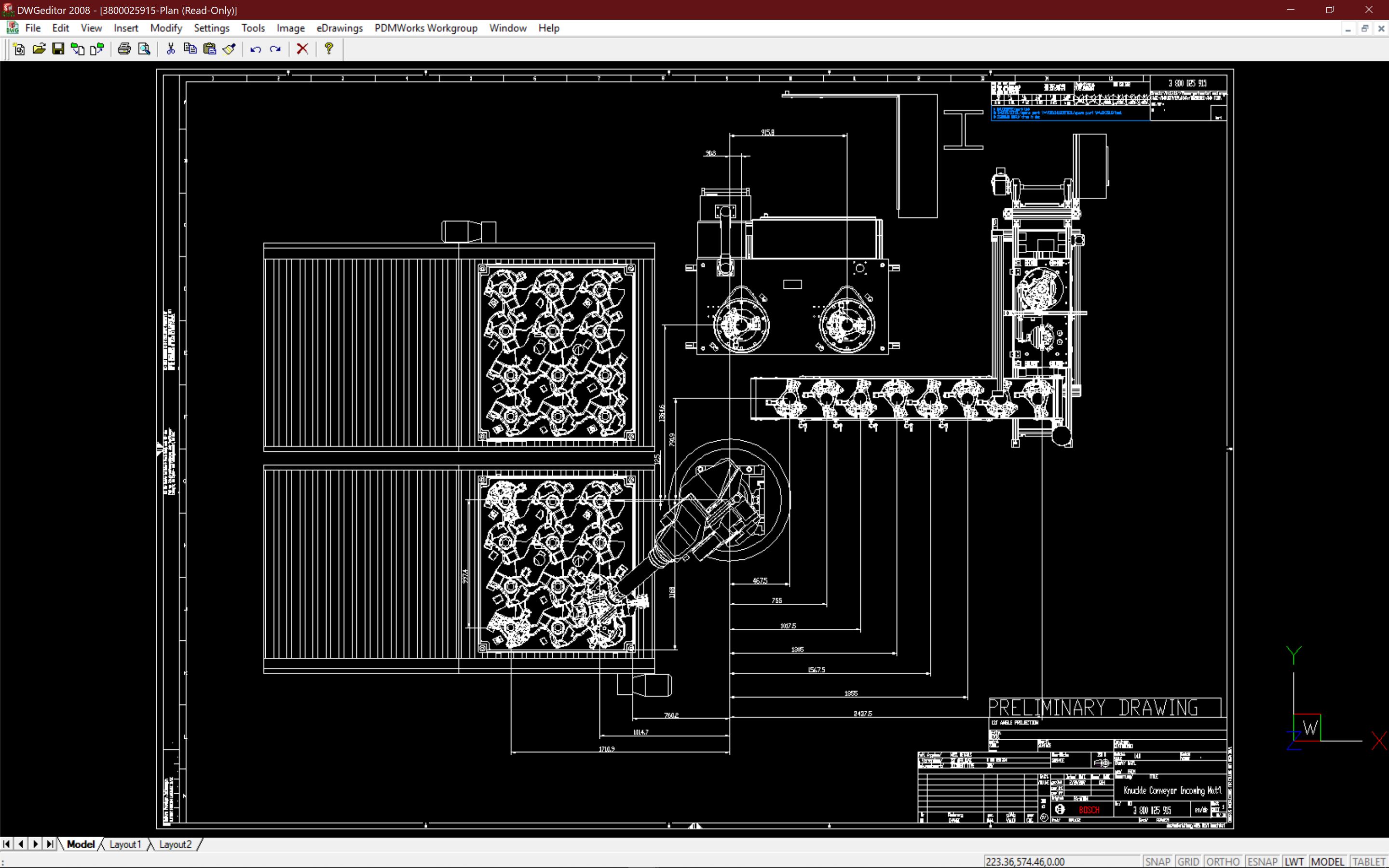
This FANUC LR MATE 200 iC V7.20 Robot Assist Bosh Engineers in programming a Robot to remove parts from dunnage, process part and reload back into dunnage for a GMT-800 Brake assembly Facility. Irvision was used to find the part nested in the tray. Karel programming required
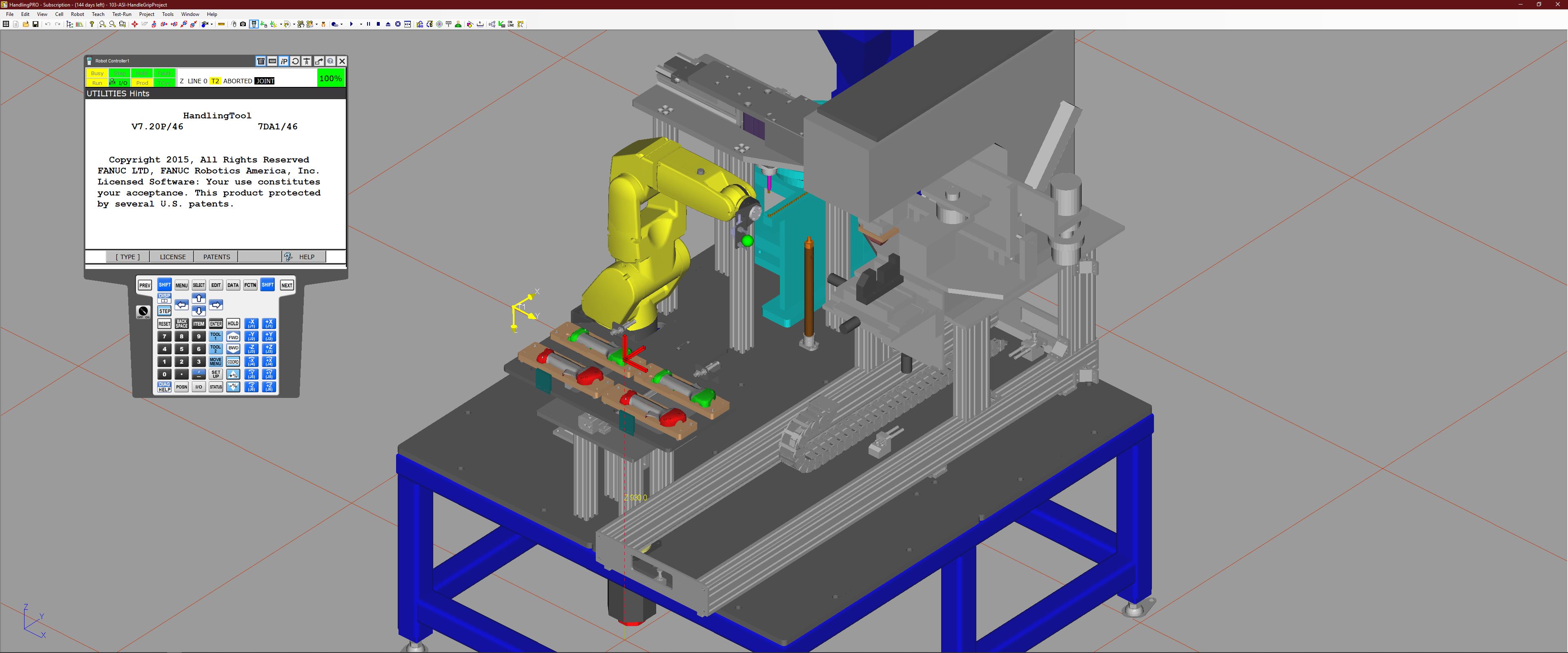
103-ASI-HANDLE GRIP PROJECT
This FANUC LR MATE 200 iC V7.20 Robot The Engel will unload a pair of handles out of the IMM and locate the set of part onto a locating fixture and clear the area. The robot will pick the parts up with a vacuum cup EOAT and locate it onto the press anvel. A vibratory bowl will singulate the anchors down a vibratory track and singluate. The press will drive the anchor into the part. The robot will move the part to the second location and press another anchor into the part. The robot will then move the part to the Pad Print station and engage the print head onto the part. The robot will then set the part onto the outfeed conveyor. The robot will use the internal I/O of the LR 200 robot to control the peripheral devices (Pad Print, Anchor, fixture and output Stations). There is also interface signals to/from the Engel IMM.
101-SPI-ROBOTIC CNC LOAD UNLOAD SYSTEM
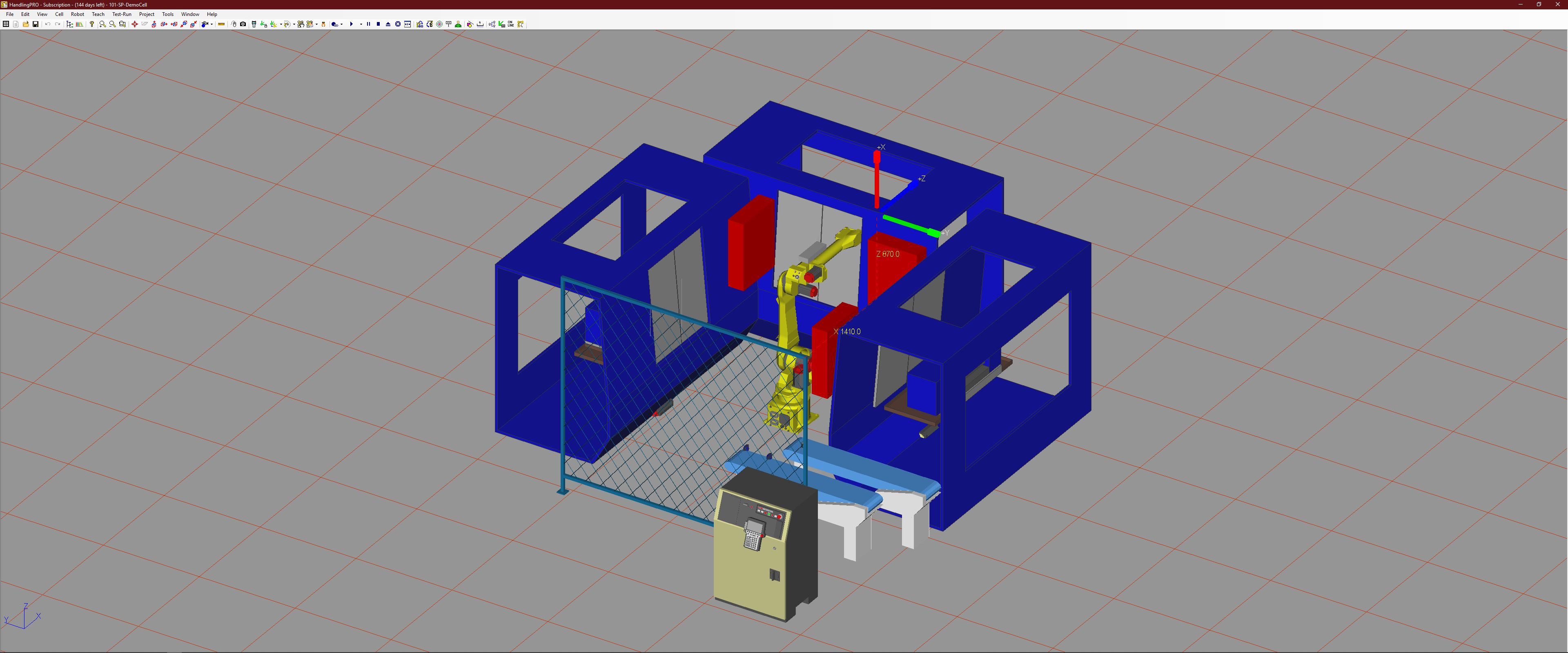
This FANUC M-16iB/10L - V7.20 Design and develop a robot to load and unload rocker arms into and out of three Haas VF2 machines. This includes electrical design, software development, debugging and installing the system on site. (DEC-2006)